Car Class Reference#
| Demo |
doxysphinx::rst::Car Class Reference
A car. More...
#include <car.hpp>
Inheritance diagram for doxysphinx::rst::Car:
Collaboration diagram for doxysphinx::rst::Car:
Public Member Functions | |
| Car (Engine &engine, Color &color) | |
| Creates a new instance of the Car. | |
| void | enter (Driver &driver) |
| enter for driver | |
| void | enter (Person &person) |
| void | leave (Person &person) |
| leave for person or driver | |
| void | accelerate (float target_speed_ms) |
| void | brake (float brake_force_nm) |
| brakes the car | |
Detailed Description
A car.
Warning
This car is a top secret prototype.
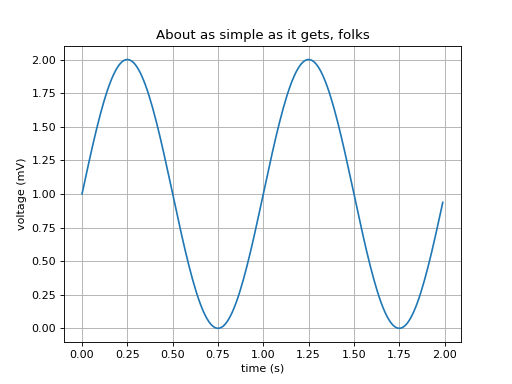
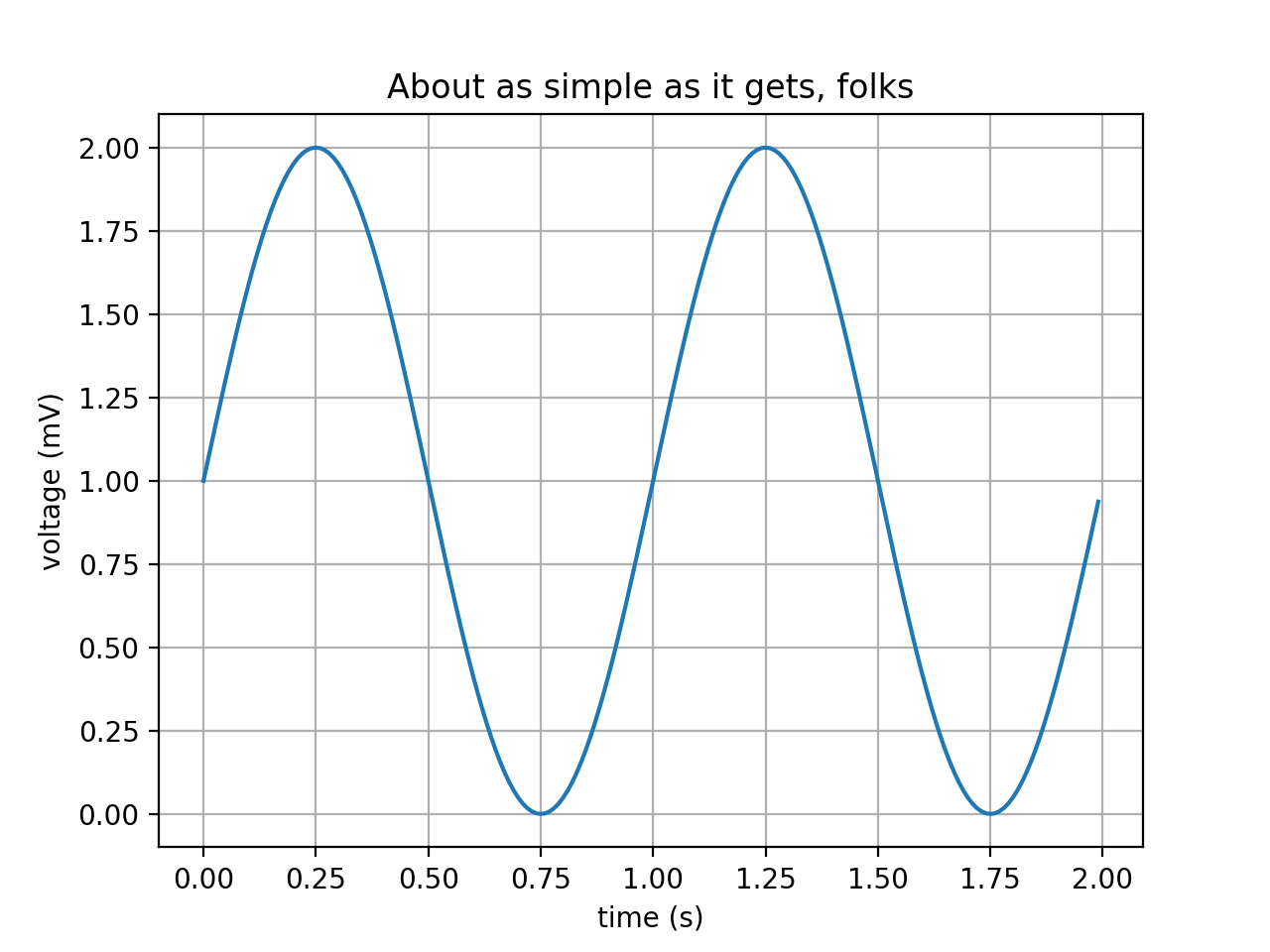
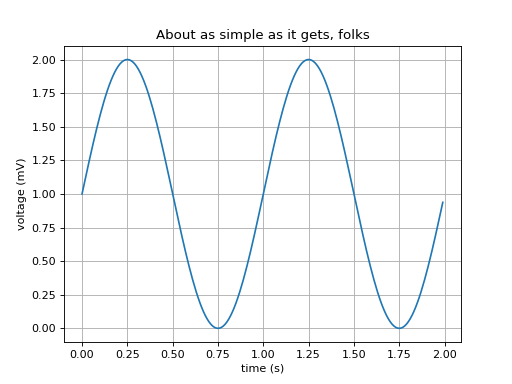
Here is a plot to show it's true power:
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Constructor & Destructor Documentation
◆ Car()
| inline |
Member Function Documentation
◆ accelerate()
| void doxysphinx::rst::Car::accelerate | ( | float | target_speed_ms | ) |
accelerates the car
Tip
The following is an example of a table contains formulas using Math LateX
Heading Description |
Heading Formula |
|---|---|
Distance of the dynamic border from ego coordinate system at latexmath:[t=0] |
\(d_{Border}\) |
Course of the dynamic border |
\(s_{Border}(t)\) |
Acceleration of the dynamic border associated with the target object |
\(a_{Border}(t)\) |
Longitudinal vehicle velocity |
\(v_{Ego}(t)\) |
Longitudinal vehicle acceleration |
\(a_{Ego}(t)\) |
The documentation for this class was generated from the following file:
- demo/demo/src/car.hpp
Generated by